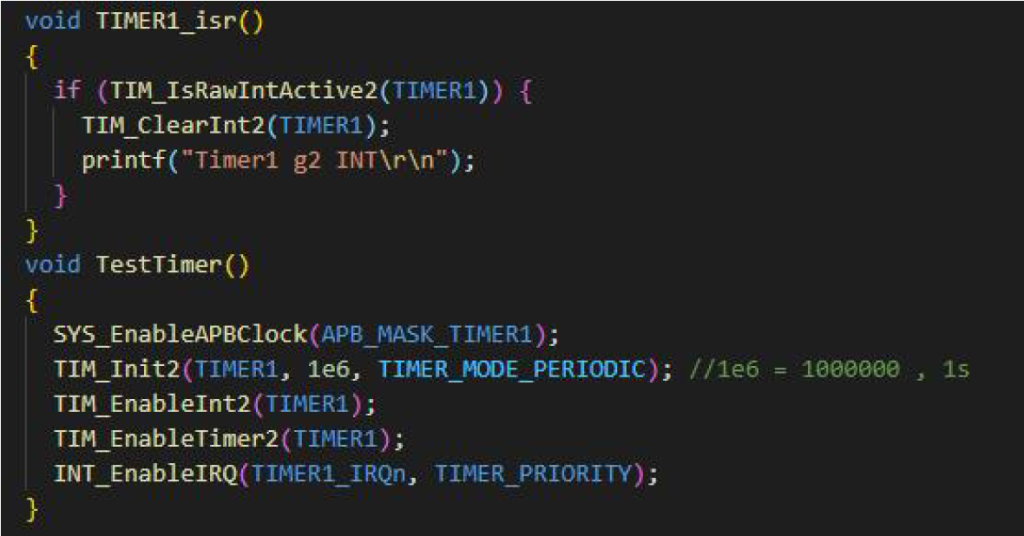
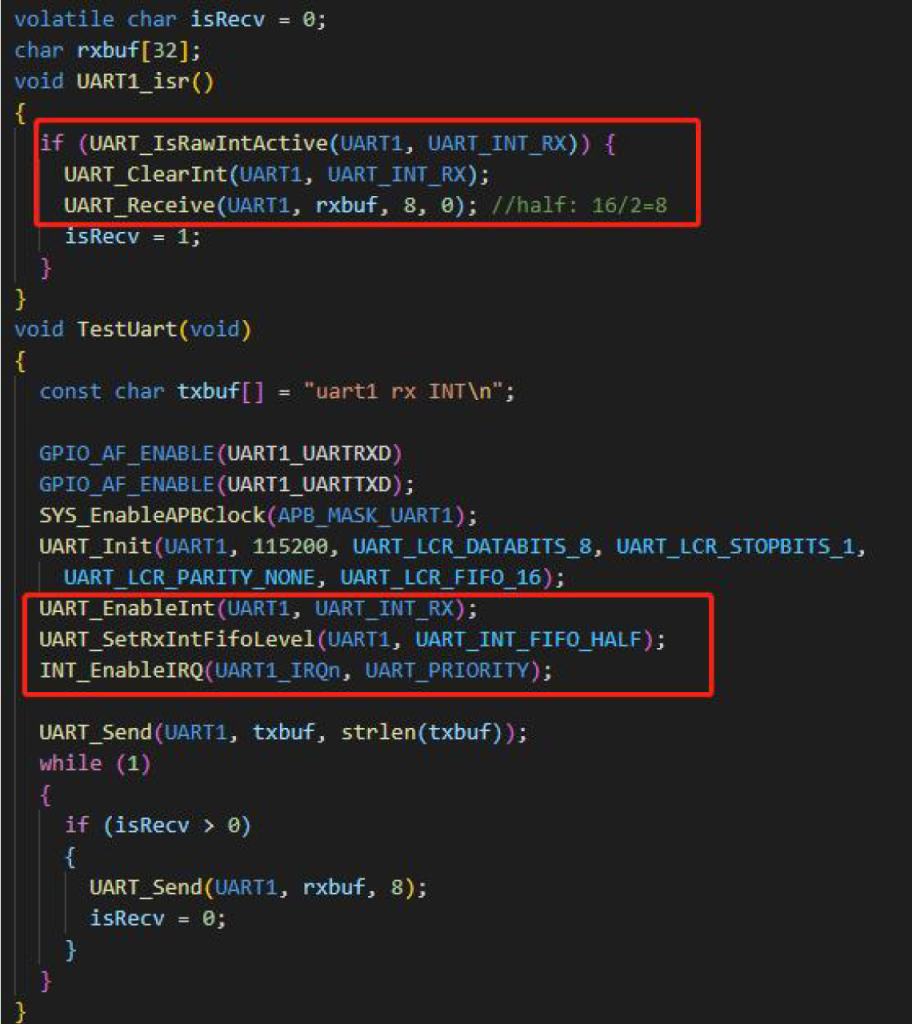
中断函数UART1_isr 在SDK 中已经默认关联,不用手动设置。
在中断函数中,要判别中断来源再继续操作。
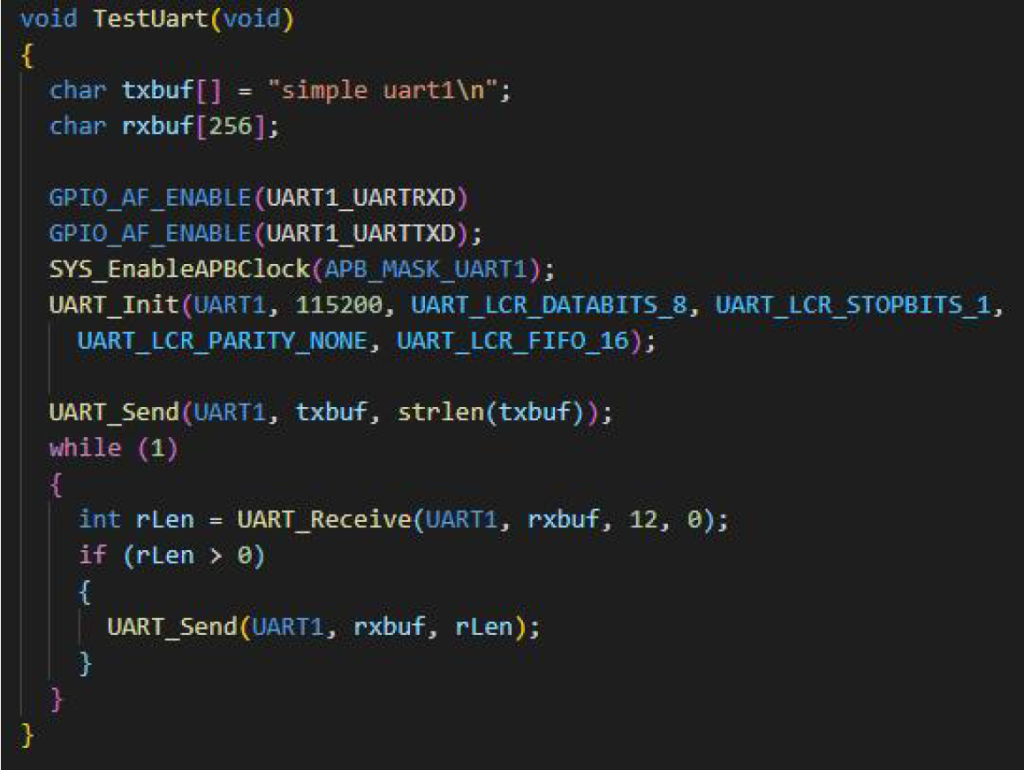
上例中,收FIFO 因为设置为16 字节,半数触发时,收到8 个字节就会触发中断。
如果每来一个字节中断接收一次,可以在UART_Init 中设置参数为UART_LCR_FIFO_1,并且不用再调用UART_SetRxIntFifoLevel 函数。
3.使用DMA 收发:
如果要启用DMA 功能,参考sdk 中自带的样例。
需要增加3 个函数:
DMAC_Init:启动dma
UART_SetDmaMode:设置只要收/发dma,或收发都要dma
DMAC_Config:设置dma 的详细参数。
如果收发都要dma,则需要调用2 次DMAC_Config 来分别设置。
函数DMAC_Config 的参数说明:
void DMAC_Config(
DMAC_ChannelNumTypeDef channel, //DMA 通道
uint32_t srcAddr, //DMA 数据源地址
uint32_t dstAddr, //DMA 数据目标地址
DMAC_AddrIncTypeDef srcIncr, //传输后源地址是否自增
DMAC_AddrIncTypeDef dstIncr, //传输后目标地址是否自增
DMAC_WidthTypeDef srcWidth, //源地址传输数据的字节宽度(可选8/16/32)
DMAC_WidthTypeDef dstWidth, //目标地址传输数据的字节宽度(可选8/16/32)
DMAC_BurstTypeDef srcBurst, //源地址一次传输多少???
DMAC_BurstTypeDef dstBurst,
uint32_t transferSize, //传输多少次
DMAC_FlowControlTypeDef transferType, //传输方向类型(8 种)
uint32_t srcPeripheral, //源地址的外设类型
uint32_t dstPeripheral //目标地址的外设类型
)
比如,设置收DMA,会设置参数如:
DMAC_Config(DMAC_CHANNEL1,
(uint32_t)&UART3->DR, //串口数据寄存器
(uint32_t)rxbuf, //收缓冲buff
DMAC_ADDR_INCR_OFF, //源地址不自增
DMAC_ADDR_INCR_ON, //目标地址自增
DMAC_WIDTH_8_BIT, //源数据宽度以8bit 为单位
DMAC_WIDTH_8_BIT, //目标数据宽度以8bit 为单位
DMAC_BURST_1,
DMAC_BURST_1,
0, //传输多少次,如果是0 则无限制
DMAC_PERIPHERAL_TO_MEM_PERIPHERAL_CTRL, //外设到内存的方向
UART3_RX_DMA_REQ, //源数据外设类型
0 ); //目标数据外设类型
设置发的DMA,会设置参数如:
DMAC_Config(DMAC_CHANNEL0,
(uint32_t)txbuf, //发缓冲
(uint32_t)&UART3->DR, //串口数据寄存器
DMAC_ADDR_INCR_ON, //发缓冲自增
DMAC_ADDR_INCR_OFF, //寄存器不自增
DMAC_WIDTH_8_BIT, //源数据宽度以8bit 为单位
DMAC_WIDTH_8_BIT, //目标数据宽度以8bit 为单位
DMAC_BURST_1,
DMAC_BURST_1,
dma_count, //要传输的数据量
DMAC_MEM_TO_PERIPHERAL_DMA_CTRL, //内存到外设的方向
0, //源数据外设类型
tx_dma_req); //目标数据外设类型
以上完整代码样例请参考example 部分。
3. 更多样例,请参考网盘:
1).dma 中断:“其他文档\驱动样例补充\example_uart_dmaIrq.c”
2).闲时中断:“其他文档\驱动样例补充\example_uart_rcvIqr.c”